Back to Physics PlugITs content page
"Physic slider" PlugIT
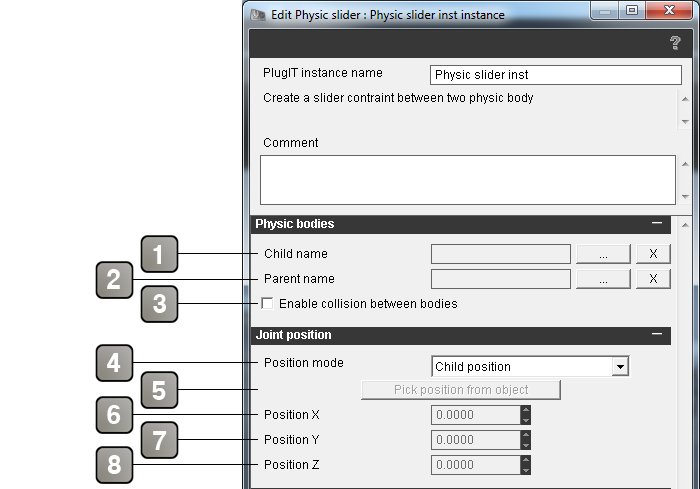
This PlugIT allows to create a physical constraint of cursor-type on an axis between two objects.
Parameters |
|
1 |
Name of the first physical object. |
2 |
Name of the second physical object.If there is no object, then the world will be used as a reference for the constraint. |
3 |
Enables the collision between the two objects if checked. |
4 |
Defines a method to define the constraint position. Depending on the child, the parent or a customized object. |
5 |
If the position is on a custom mode, then you can set the position from a scene object. |
6 |
X position of the constraint. |
7 |
Y position of the constraint. |
8 |
Z position of the constraint |
Parameters |
|
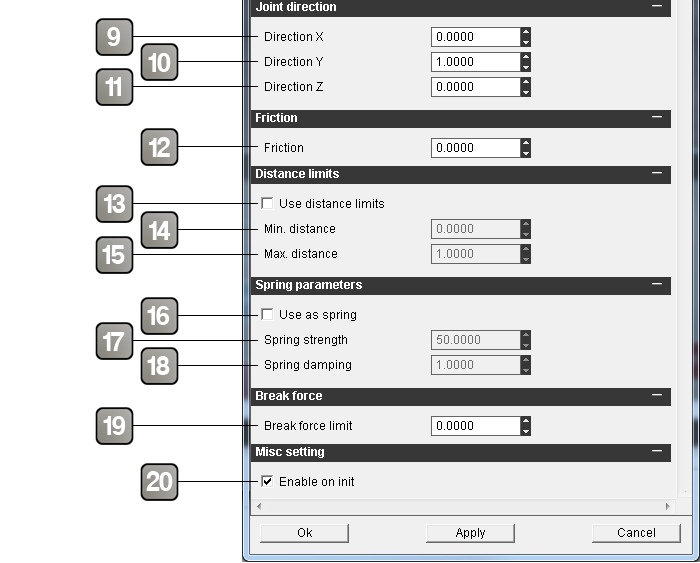
9 |
Constraint direction on X. |
10 |
Constraint direction on Y. |
11 |
Constraint direction on Z. |
12 |
Constraint friction. |
13 |
If checked, the constraint will be limited over its distance on its axis. |
14 |
Minimal distance of the constraint. |
15 |
Maximal distance of the constraint. |
16 |
If checked, the constraint will be used as a string. |
17 |
String force if the spring constraint is enabled. |
18 |
String damping if the spring constraint is enabled. |
19 |
Defines the necessary force on the constraint in order to break it. If the force is defined at 0.0 then the constraint can not be broken. |
20 |
Enables the PlugIT when the application starts. |
Events |
|
Force |
Sends the applied force over the constraint. |
Broken |
This event is sent when the constraint breaks. |
Action |
|
Enable |
Enables the constraint. |
Disable |
Disables the constraint. |
Set motor |
Applies a constant translation force, the velocity of the transition is defined in the link parameter. |
Stop motor |
Disables the constant translation force. |
Lock |
Blocks the constraint to the current position. |
Unlock |
Unlocks the constraint. |