Back to Physics PlugITs content page
"Physic tools" PlugIT
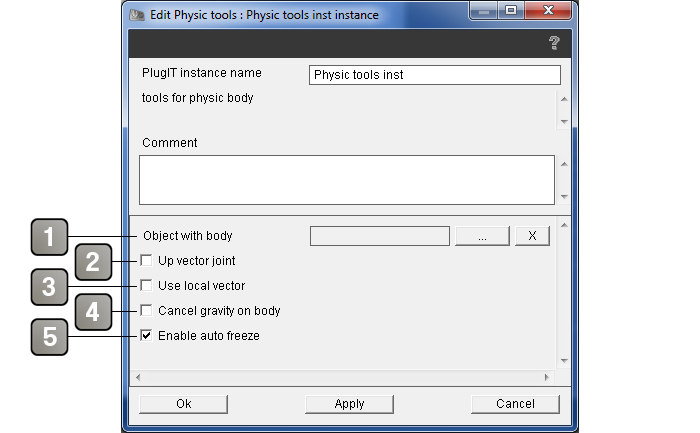
This PlugIT allows to access to a complet toolbox in order to parameter the physical reaction on an object.
Parameters |
|
1 |
Name of the object the physics will be applied (the object must be parameter with a physical body). |
2 |
If checked, the object will be constraint on the Y axis. |
3 |
Uses the local coordinates of the object. |
4 |
Disables the gravity of the object. |
5 |
If checked, the object is automatically frozen when it reachs its balance point. |
Events |
|
Has motion |
Sends when an object is moving (unbalanced). |
Has no motion |
Sends when an object is fixed (balanced). |
Leaves world |
Sends when the object leaves the physical world. |
Omega |
Angular velocity of the object. |
Velocity |
Linear velocity of the object. |
Ray intersect in |
The object is caught in a physical raycast. |
Ray intersect out |
The object leaves the physical raycast. |
Contact |
The object collides with a physical material (defined by a "Physic contact" PlugIT). Parameters are in the orders : the collided object name, its physical material, the second physical material, the x y z position of the contact, its x y z normale position, the x y z force and its velocity. |
Overlap started |
The object collides an other physical material (defined by a "Physic contact" PlugIT). Parameters are in the orders : the collided object name, its physical material, the second physical material. |
Overlap stopped |
The object no longer collides an other physical material (defined by a "Physic contact" PlugIT). Parameters are in the orders : the collided object name, its physical material, the second physical material. |
Grabed |
Sends if the object is grabed (using the "physic mouse" or "Leap Motion" PlugIT). |
Ungrabed |
Sends if the object is released (using the "physic mouse" or "Leap Motion" PlugIT). |
Object setted |
Sends when the "Set object" action is used. |
Action |
|
Add constant force |
Adds a constant linear force. |
Add constant torque |
Adds a constant angular force. |
Add force |
Adds a force. |
Add impulse |
Adds an impulse. |
Add torque |
Adds a constant angular (rotation). |
Add velocity |
Adds velocity |
Reset body |
Resets the position and the orientation of the object. All the forces are reset to 0. |
Reset world |
Resets the world. |
Set auto freeze |
Enables/disables the autofreeze. |
Set constant force |
Enables/disables a constant force. |
Set constant torque |
Applies a constant angular force vector (rotation). |
Set enable |
Enables or disables the physical on the object (the link takes the 1 or 0 values in the parameter). |
Set fluid volume ratio |
Change the ratio between the volume and the density of the fluid. |
Set fluid |
Define if the object act as a fluid volume. |
Set force |
Applies a linear force. |
Set gravity state |
Enables/disables gravity on the object. |
Set mass |
Changes the mass object. |
Set object |
Changes the source object by setting a new name object in the parameter (use the "Get object" plugIT to set the object name correctly). On the second line of the parameter you can set 0 to prevent the previous object to be resetted. |
Set omega |
Applies an angular velocity vector (rotation). |
Set torque |
Applies an angular force vector (rotation). |
Set velocity |
Applies a move velocity vector (rotation). |
Set world enable |
Enables/disables the physics. |
Set world gravity |
Changes the gravity vector of the world. |
Apply on object |
Applies the current body properties to the object passed in link parameter (use the "Get object" plugIT to set the object name correctly). |