Back to Physics PlugITs content page
"Physic vehicle" PlugIT
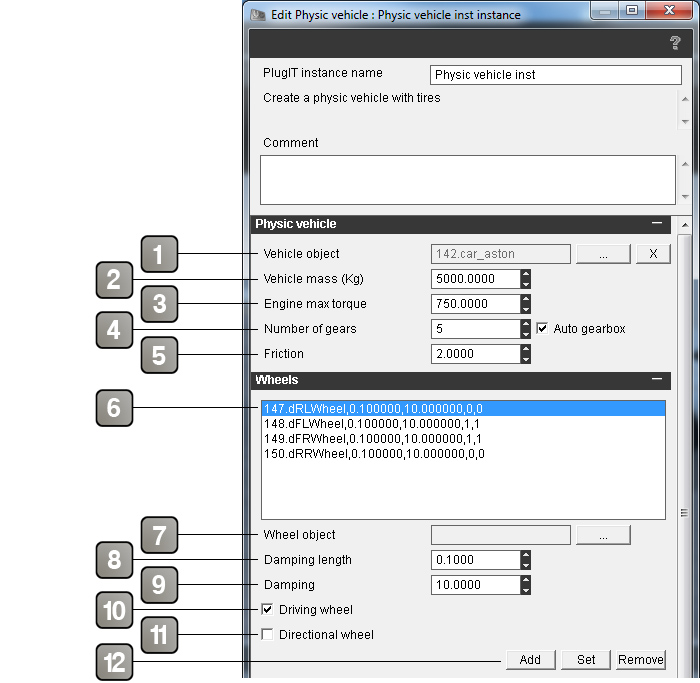
This PlugIT allows to create a vehicle affected by the physics engine.
Parameters |
|
1 |
Name of the vehicle's chassis. If the object is already set with a physical body, then this one will be used. In the opposite case, a physical body in created. |
2 |
Defines the vehicle mass. |
3 |
Defines the maximal rotation force of the torque. |
4 |
Defines the gear numbers of the vehicle. Check "Auto gearbox" in order to enable the automatic mode. |
5 |
Defines the friction coefficient of the wheels, lower is the value, more the vehicle skids. |
6 | cie
Defined wheel list. |
7 |
Defines the use object for the visual render of the wheel. |
8 |
Defines the damping height of the wheel. |
9 |
Defines the damper force. |
10 |
If checked, switch the wheel mode from fix to drive wheel. |
11 |
If checked, the wheel will be directional. |
12 |
Click on "Add" in order to add a wheel, "Set" to modify the created wheel and "Remove" to delete it. |
Parameters |
|
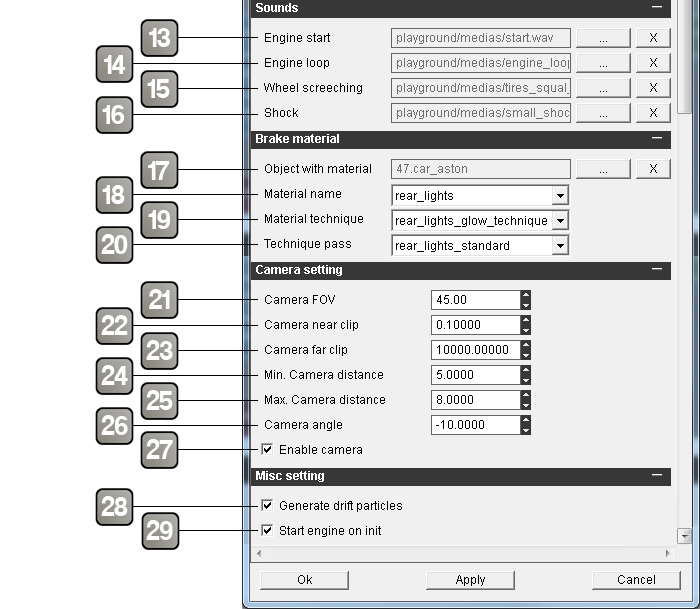
13 |
Defines the audio file pour the engine start (use a mono sound for a 3D render). |
14 |
Defines the audio file in loop for the engine (use a mono sound for a 3D render). |
15 |
Defines the audio file in loop for the squealing of the tires (use a mono sound for a 3D render). |
16 |
Defines the audio file for the chassis shock when there is a collision (use a mono sound for a 3D render). |
17 |
Selects the object with the brake light material. When the vehicle brakes, this material will be used. |
18 |
Material name of the brake light. |
19 |
Material technique name of the brake light. |
20 |
Material pass name of the brake light. |
21 |
External camera focal of the vehicle. |
22 |
Minimal view distance of the camera. |
23 |
Maximal view distance of the camera. |
24 |
Minimal distance of the camera from the car. |
25 |
Maximal distance of the camera from the car. |
26 |
Camera angle linked to the vehicle. |
27 |
If checked, it enables the camera when the PlugIT starts. |
28 |
If checked, enables particules when the tires skid. |
29 |
If checked, the engine starts when the PlugIT is on. |
Events |
|
Speed |
Sends the vehicle speed value (Km/h). |
Rpm |
Sends the wheel rotation speed value in Radian per minute (Rpm). |
Gear |
Sends the actual gear value. |
Steer angle |
Sends the directional wheel angle value. |
Action |
|
Control |
Allows to link a "Control" event to the vehicle controlling the wheel directions (with the "Joypad" PlugIT for example). |
Reset |
Resets the vehicle on its wheels. |
Start engine |
Starts the vehicle engine. |
Stop engine |
Stops the vehicle engine. |
Brake |
Defines the brake coefficient of the vehicle, the value is in the link parameter. |
Stop brake |
Stops the vehicle brake. |
Hand brake |
Blocks the vehicle wheels, use "Stop brake" to release it. |
Enable camera |
Enables the external camera of the vehicle. |
Disable camera |
Disables the external camera of the vehicle. |
Set automatic gearbox |
Enables or disables the automatic gearbox, use the 1 or 0 values in the link parameter. |
Turn |
Defines the wheel rotation coefficient of the vehicle, use a value between 1 or -1 in the link parameter. |
Accelerate |
Defines the vehicle acceleration coefficient, use a value between 0 or 1 in the link parameter. |
Gear up |
Gears up the actual gear. |
Gear down |
Gears up the actual gear. |
Reverse |
Triggers backward moving in automatique gearbox mode, the acceleration coefficient is define by using a value between 0 or 1 in the link parameter |